

PI普爱 G-910.RC01 满足低功耗要求的ACS驱动程序模块

PI普爱 G-910.RC01 满足低功耗要求的ACS驱动程序模块
用于 2 个驱动轴,带交流伺服电机、直流电机、音圈电机、步进电机



通用驱动器模块,作为台式设备或控制柜模块
直接与 PI 的定位器兼容
用于交流伺服电机/无刷直流电机、有刷直流电机、音圈电机、步进电机
用于增量式和绝对式测量编码器的编码器输入
输出功率达 480 W(60 V 时)
通过 EtherCAT 进行通信
产品描述
通用驱动模块
ACS 驱动器模块用于作不同类型的电机和编码器,可针对各种应用进行配置。2 轴,每轴 5 A 连续电流。2 个电机制动器通过 PWM 制动驱动器,减少电机制动器的发热。运动配置文件由外部运动控制器生成,例如 G-910。RC02 接收。运动控制器必须单独订购。
编码器
支持增量编码器(正弦/余弦或RS-422)和绝对编码器(EnDat 2.2 & 2.1,Smart-Abs,Panasonic,BiSS-A/B/C (SSI))。根据应用的不同,编码器可以分别连接到电机接口或单独的传感器接口。
通信
用于集成到 ACS EtherCAT 网络的 EtherCAT 接口。例如,通过 G-910 进行指挥。RC02 运动控制器,其中集成了 ACS 的 SPiiPlusEC 控制器 EtherCAT 主站等。
外壳类型
控制柜版本的供货范围内包括用于安装在 TH-35 顶帽导轨或安装板上的适配器,可用作台式设备或控制柜模块。
I/O 线
数字输入和输出可以灵活配置。为了评估参考开关,数字输入也可以引至电机连接器。根据应用,限位开关和参考开关的输入可配置为 5 V 或 24 V,也可配置为 PNP 或 NPN 输入。输出频率高达 10Mhz 的位置同步触发信号可以在高行进速度下实现精确的过程控制(位置事件发生器 – PEG)。
配置
如果在订购时指定了使用的定位器类型,则 G-910 的所有连接器。RC01 / G-910 号。RC03 在交付时进行了适当的预配置。规格中详细说明了没有定位器特定调整的默认配置。如需后续调整,请联系我们的服务部门。
规格
|
|
G-910.RC0102100 / G-910.RC0102200 / G-910.RC0302200 |
|---|---|
|
Function |
ACS UDMnt driver module, with connectors for positioners from PI |
|
Version |
G-910.RC01xxxxx: Benchtop device G-910.RC03xxxxx: Control cabinet module |
|
Motor types |
2 and 3-phase AC servo motors / brushless DC motors, brushed DC motors, voice coil motors, stepper motors |
|
Number of drive axes |
2 |
|
Motion and control |
G-910.RC0102100 / G-910.RC0102200 / G-910.RC0302200 |
|---|---|
|
Controller type |
Cascading PIV controller structure with velocity and acceleration feedforward control |
|
Sampling rate current control |
20 kHz |
|
Control algorithms |
Gantry control, dual-loop control |
|
Encoder |
1 × per axis, supported types: Incremental: 1Vss, RS-422 Absolute: EnDat 2.2 & 2.1, Smart-Abs, Panasonic, BiSS-A/B/C (SSI) |
|
Limit switches |
2 × per axis Default: 5 V sinking (NPN) Optional configuration: 24 V; sourcing (PNP) |
|
Reference switch |
Default: 1 × per axis, 5 V sinking (NPN) Optional configuration: 24 V; sourcing (PNP); use as digital multipurpose inputs on HD-D-sub 15 (f) |
|
Motor brake |
1 × per axis Integrated PWM brake driver with current reduction for a reduced heating up of the brake |
* 取决于使用的电源适配器
** 使用随附的电源适配器未达到允许的最大值
|
Electrical properties |
G-910.RC0102100 |
G-910.RC0102200 |
G-910.RC0302200 |
|---|---|---|---|
|
Output voltage (intermediate circuit)* |
24 V |
48 V |
12 V to 60 V |
|
Max. output power (intermediate circuit)* |
120 W per axis |
280 W per axis |
480 W per axis (at 60 V DC, 8 A input current) |
|
Current limitation per motor phase (amplitude of sine), continuous/peak (max. 1 s) |
5 A / 9.5 A peak** |
5 A / 9.5 A peak** |
5 A continuous / 10 A peak |
|
Interfaces and operation |
G-910.RC0102100 / G-910.RC0102200 / G-910.RC0302200 |
|---|---|
|
Motor connector |
2 × HD D-sub 26 (f) |
|
Sensor connector |
2 × D-sub 15 (m) or 2 × via the motor connectors Default factory configuration at delivery: Digital incremental encoder (RS-422) or absolute encoder on motor connector Incremental encoder 1 Vss on D-sub 15 (m) Default factory configuration at delivery: Digital incremental encoder (RS-422) or absolute encoder on D-sub 15 (m) |
|
Digital I/O lines |
HD D-sub 15 (f): 2 × outputs PNP 24 V source; also control the brake drivers at the motor connectors Default for inputs: 2 × PNP 24 V source on HD D-sub 15 (f); in addition 2 × NPN 5 V sinking for reference switches on the motor connectors Optional configuration for inputs: 4 × PNP 24 V source on HD D-sub 15 (f) |
|
Analog I/O lines |
HD D-sub 15 (m): 2 differential analog inputs: ±10 V, 12-bit 1 differential analog output: ±10 V, 10 bit |
|
Outputs for position event generator (PEG) |
Parallel on HD D-sub 15 (m) and HD D-sub 15 (f): 2 differential outputs (RS-422) for pulses at programmable positions, pulse width 26 ns to 1.75 ms, max. 10 MHz; only possible with incremental encoder |
|
Communication interfaces |
EtherCAT |
|
Miscellaneous |
G-910.RC0102100 |
G-910.RC0102200 |
G-910.RC0302200 |
|---|---|---|---|
|
Operating voltage intermediate circuit |
24 V DC from external power adapter, power adapter with 24 V DC (120 W) included in the scope of delivery |
48 V DC from external power adapter, power adapter with 48 V DC (280 W) included in the scope of delivery |
12 V to 60 V DC from external power adapter, not included in the scope of delivery |
|
Operating voltage logic |
24 V DC from external power adapter, power adapter with 24 V DC (120 W) included in the scope of delivery |
24 V DC from external power adapter, power adapter with 24 V DC (120 W) included in the scope of delivery |
24 V DC from external power adapter, not included in the scope of delivery |
|
Max. current consumption intermediate circuit |
5 A* |
5 A* |
<8.6 A |
|
Max. current consumption logic |
0.9 A |
0.9 A |
0.9 A |
|
Operating temperature range |
5 °C to 40 °C (temperature protection switches off at excessively high temperatures) |
5 °C to 40 °C (temperature protection switches off at excessively high temperatures) |
5 °C to 40 °C (temperature protection switches off at excessively high temperatures) |
|
Mass |
1.55 kg |
1.55 kg |
1.4 kg |
|
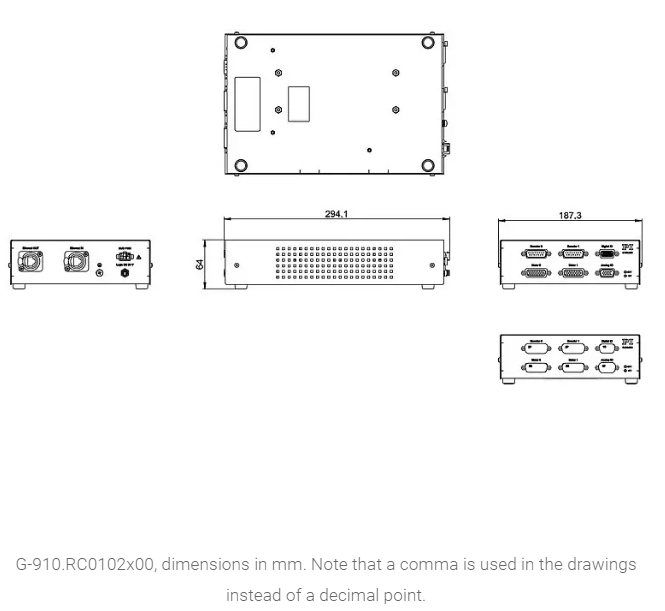
Dimensions |
187.3 mm × 64 mm × 294.1 mm |
187.3 mm × 64 mm × 294.1 mm |
186.4 mm × 56 mm × 295.2 mm |
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com