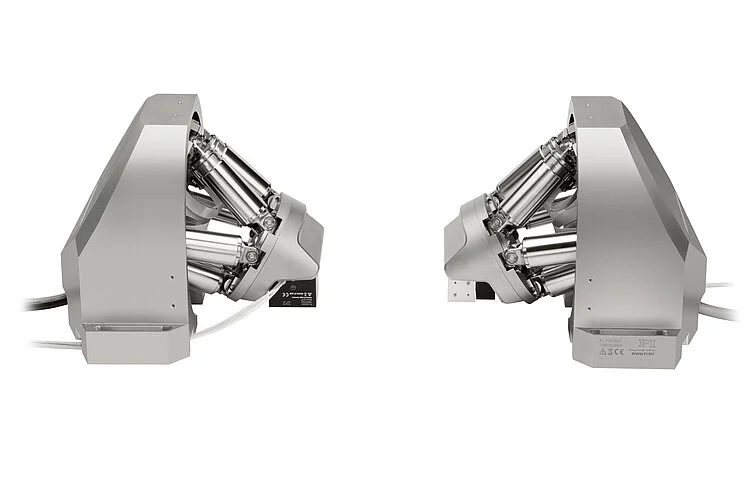


PI普爱 F-712.HA2 紧凑型高速6自由度光子对准系统

PI普爱 F-712.HA2 紧凑型高速6自由度光子对准系统
单面和双面,直立和低矮,全自动阵列对齐程序


规格
|
Motion and positioning |
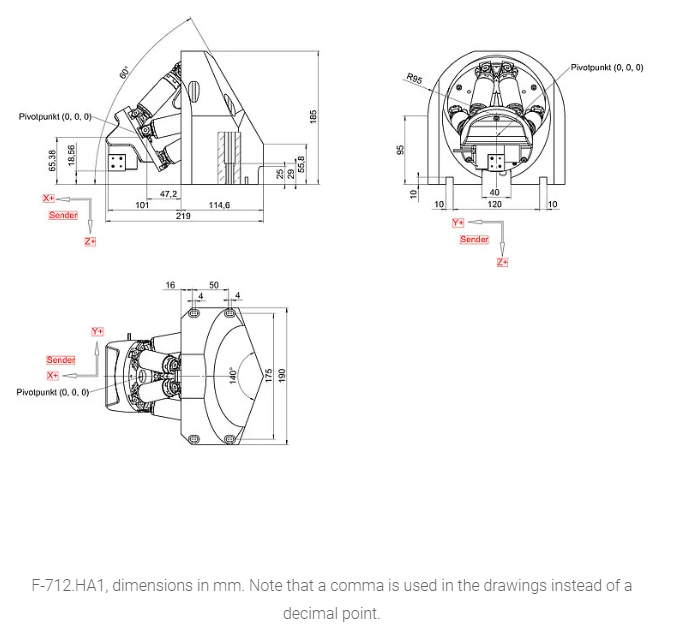
F-712.HA1 |
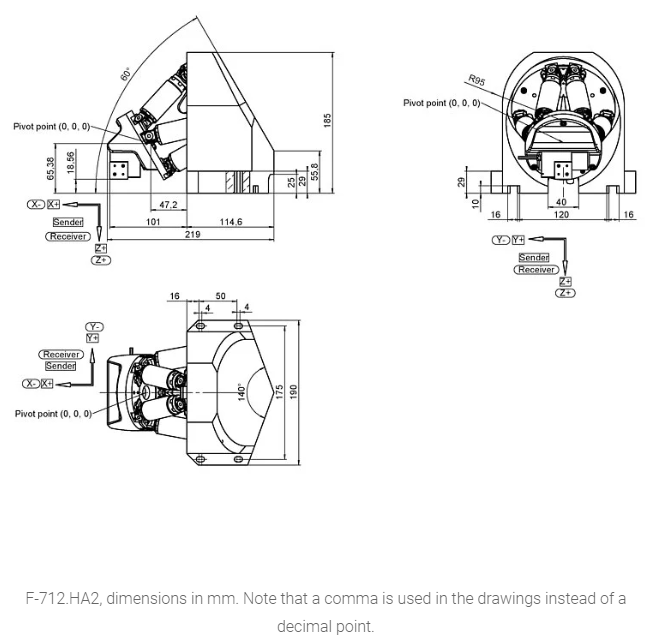
F-712.HA2 |
F-712.HU1 |
Unit |
|---|---|---|---|---|
|
Number of active axes |
9 |
18 |
9 |
|
|
Rough positioning |
||||
|
Active axes |
X, Y, Z, θX, θY, θZ |
|
||
|
Travel range in X, Y, Z |
±6,5, ±16, ±8,5 |
±17, ±16, ±6,5 |
mm |
|
|
Travel range in θX, θY, θZ |
±14,5, ±10, ±10 |
±10, ±10, ±21 |
° |
|
|
Minimum incremental motion in X, Y |
0.1 |
µm |
||
|
Minimum incremental motion in Z |
0.1 |
0.05 |
|
|
|
Max. velocity |
10 |
mm/s |
||
|
Sensor type |
Incremental rotary encoder |
|
||
|
Drive type |
Brushless DC motor |
|
||
|
Fine positioning |
||||
|
Active axes |
X, Y, Z |
|
||
|
Travel range in X, Y, Z, closed loop |
100 |
µm |
||
|
Min. incremental motion, open-loop |
0.3 |
nm |
||
|
Min. incremental motion, closed-loop |
2.5 |
nm |
||
|
Linearity error, for the entire travel range* |
2 |
% |
||
|
Repeatability (bidirectional) 10% travel range |
2 |
nm |
||
|
Sensor type |
Incremental linear encoder |
|
||
|
Drive type |
PICMA® |
|
||
|
Alignment |
||||
|
Scanning time of spiraled area scan 500 µm Ø** |
< 2 |
< 5 |
< 2 |
s |
|
Scanning time of spiraled area scan 100 µm Ø** |
< 0.3 |
< 1 |
< 0.3 |
s |
|
Scanning time of spiraled area scan 10 µm Ø** |
< 0.2 |
< 0.5 |
< 0.2 |
s |
|
Signal optimization with gradient search, randomized with ±5 µm (repeatability < 0.01 dB)*** |
< 0.3 |
s |
||
|
Requirements for the optical power meter |
Unit |
|
|---|---|---|
|
Output signal |
Analog output, ideally converted from linear to logarithmic |
|
|
Output voltage range, max. |
-5 to 5 |
V |
|
Bandwidth, min. |
1 |
kHz |
|
Noise level, max. |
-60 |
dBm |
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com