
PI普爱 A-142.010A2 带空气轴承的PIglide音圈线性载物台

PI普爱 A-142.010A2 带空气轴承的PIglide音圈线性载物台
高性能 • 洁净室兼容 • 垂直安装选项
速度可达 200 mm/s
加速度可达 10 m/s2
传感器分辨率:5 nm
27 mm 的扁平
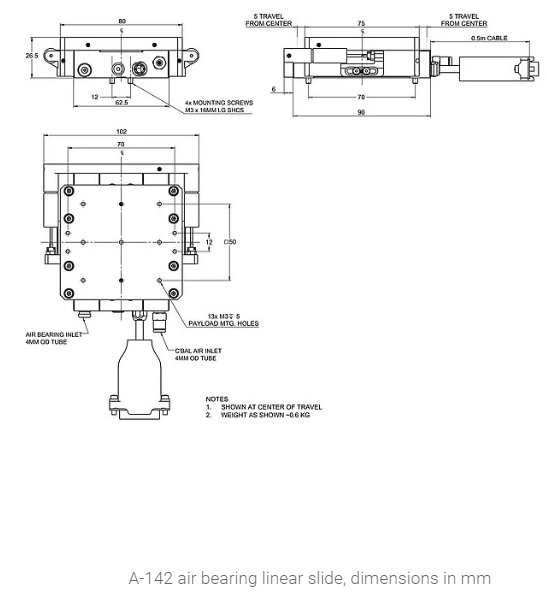
非常紧凑的运动平台:75 mm × 80 mm
行程范围达 10 mm
负载能力达 3 kg
产品描述
超紧凑型电动空气轴承线性平台
A-142 微型线性平移平台是一种独特的高性能精密纳米定位系统,具有直接驱动的音圈线性电机、高分辨率线性编码器和无摩擦和刚性空气轴承导轨。它非常适合免维护、高占空比的工业扫描和定位应用。这个音圈驱动舞台的特殊设计不使用任何内部移动电缆。
用于高性能线性运动的小型化平台设计
尽管尺寸小,但这种微型线性平移平台可提供高性能的线性运动,这是带有机械轴承的传统平台无法满足的。空气轴承滑轨不需要润滑剂,也不会产生颗粒,这使得它们与洁净室兼容,这是光子学、光学和半导体相关测试、计量和对准应用的另一个优势。由于直接驱动的音圈直线电机和空气轴承完全免维护和无磨损,因此这种紧凑的平移平台可用于工业、高吞吐量、24/7 精密运动应用。
高精度、可重复性和超平稳的运动
基于直接测量的线性编码器,以及直接驱动电机和空气轴承直线导轨中的无摩擦,这种小型化空气轴承滑轨可以在非常宽的动态范围内提供极其平稳的运动。它提供高达 200 mm/s 的高速和 1 g 的高加速度。集成的线性编码器具有 5 纳米的传感器分辨率,载物台平台提供 50 纳米的最小增量运动。它可以被命令到其行程范围内的任何位置,位置重复精度为 0.1 μm。音圈直线电机平台的高速和加速度是高速扫描应用的一项资产。
垂直 Z 平台作 – 平衡选项
A-142 微型平移台还配有平衡装置,可作为垂直定位台运行。平衡装置在稳定阶段/位置保持作期间保持电机电流。
多轴微型载物台应用 – 微型 XY 工作台和 XYZ 载物台
两个 A-142 空气轴承微型平台可以组装成一个微型 XY 工作台,也可以使用紧凑的 3 轴平台组合,例如处理小型光学或光纤元件上的复杂高速多轴对准任务。与 PI 工程师讨论您的应用,以获得有关最佳系统配置的免费建议。
运动控制器, 编程, 计算机控制选项
PI 提供一系列高性能运动控制器来编程和作这些空气轴承微型线性滑轨。我们建议使用 EtherCat® 兼容控制器,例如 A-811 – A-814 系列基于 ACS 的高性能运动控制器。PI 运动控制器随附大量编程示例、可用的校准例程和仿真工具,允许客户在运动系统发货前编写程序并运行基本系统测试。
为什么使用空气轴承和空气轴承平台?
与传统机械轴承相比,直线空气轴承(以及旋转空气轴承)具有更好的几何性能(俯仰、偏航、横滚、直线度和平面度、摆动和偏心度)。它们用无摩擦的气膜取代机械滚珠轴承或交叉滚子轴承的滚动或滑动接触,使用寿命几乎无限。空气轴承线性滑台式气缸和转台非常适合洁净室应用,因为它们不依赖润滑剂,也不会产生颗粒。PI 拥有具有数十年空气轴承设计、制造和装配经验的工程团队,可以提供从标准单轴微型平台到复杂定制多轴花岗岩运动系统的各种空气轴承运动系统。
为什么在紧凑型线性平台中使用音圈电机?
音圈直线电机提供无摩擦的直线运动,具有非常快速的响应、加速度和高速。对于需要 24/7 高动态扫描运动的应用,行程范围通常为 25 毫米(1 英寸)或更低,音圈直线电机是理想的解决方案。其紧凑的设计、免维护和无颗粒产生的运行是额外的优势。对于更长的行程范围,建议使用三相直线电机,例如 A-123 空气轴承线性滑轨或带机械轴承的 V-417 线性平台。
附件和选件
PIglide 过滤器和空气处理套件
用于垂直载物台安装的气动平衡器
微型空气轴承平台的应用
A-142 空气轴承微型线性平台非常适合高精度运动应用,例如计量、光子学对准系统、光学定位和扫描。非接触式设计是洁净室应用的理想选择。
Specifications
| Motion | A-142.010A1 | A-142.010A2 | Tolerance |
|---|---|---|---|
| Active axes | X | X | |
| Travel range in X | 10 mm | 10 mm | |
| Acceleration in X, unloaded | 10 m/s² | 10 m/s² | max. |
| Maximum velocity in X, unloaded | 200 mm/s | 200 mm/s | |
| Straightness error in Y (straightness) | ± 0.1 µm | ± 0.1 µm | typ. |
| Straightness error in Z (flatness) | ± 0.5 µm | ± 0.5 µm | typ. |
| Positioning | A-142.010A1 | A-142.010A2 | Tolerance |
| Minimum incremental motion in X | 0.05 µm | 0.05 µm | typ. |
| Positioning accuracy in X, calibrated | ± 0.2 µm | ± 0.2 µm | typ. |
| Bidirectional repeatability in X | 0.1 µm | 0.1 µm | typ. |
| Reference switch | Encoder index | Encoder index | |
| Limit switches | Hall effect | Hall effect | |
| Integrated sensor | Incremental linear encoder | Incremental linear encoder | |
| Sensor signal | Sin/cos, 1 V peak-peak | Sin/cos, 1 V peak-peak | |
| Sensor signal period | 20 µm | 20 µm | |
| Sensor resolution | 5 nm | 5 nm | |
| Drive Properties | A-142.010A1 | A-142.010A2 | Tolerance |
| Drive type | Voice coil | Voice coil | |
| Nominal voltage | 48 V | 48 V | |
| Peak voltage | 80 V | 80 V | |
| Nominal current, RMS | 0.5 A | 0.5 A | typ. |
| Peak current, RMS | 2 A | 2 A | typ. |
| Drive force in positive direction of motion in X | 5 N | 5 N | typ. |
| Drive force in negative direction of motion in X | 5 N | 5 N | typ. |
| Peak force in positive direction of motion in X | 20 N | 20 N | |
| Peak force in negative direction of motion in X | 20 N | 20 N | |
| Force constant | 10 N/A | 10 N/A | |
| Resistance phase-phase | 7 Ω | 7 Ω | typ. |
| Inductance phase-phase | 7.8 mH | 7.8 mH | |
| Back EMF | 9.7 V·s/m | 9.7 V·s/m | max. |
| Mechanical Properties | A-142.010A1 | A-142.010A2 | Tolerance |
| Permissible push force in X | 10 N | 10 N | max. |
| Permissible push force in Z | 30 N | 30 N | max. |
| Permissible torque in θX | 0.5 N·m | 0.5 N·m | max. |
| Permissible torque in θY | 0.5 N·m | 0.5 N·m | max. |
| Moved mass in X, unloaded | 250 g | 250 g | |
| Guide | Air bearing with air preload | Air bearing with air preload | |
| Overall mass | 600 g | 600 g | |
| Material |
Hardcoat aluminum, stainless steel mounting hardware |
Hardcoat aluminum, stainless steel mounting hardware |
|
| Miscellaneous | A-142.010A1 | A-142.010A2 | Tolerance |
| Operating temperature range | +15 to +25 °C | +15 to +25 °C | |
| Connector | D-sub 3W3 (m) | D-sub 3W3 (m) | |
| Sensor connector | D-sub 15 (m) | D-sub 15 (m) | |
| Air connector | One-touch fitting for tubing with 4 mm outer diameter | One-touch fitting for tubing with 4 mm outer diameter | |
| Operating pressure | 445 to 515 (865 to 75 psi) kPa | 445 to 515 (65 to 75 psi) kPa | |
| Air consumption | 28 L/min | 28 L/min | max. |
| Air quality | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | Clean (filtered up to 1.0 µm or better) - ISO 8573–1 class 1 ǀ Oil free - ISO 8573–1 class 1 ǀ Dry (-15 °C dew point) - ISO 8573–1 class 3 | |
| Cable length | 0.5 m | 0.5 m | |
| Recommended controllers / drivers |
A-81x ACS-based motion controller for medium power requirements, 2 / 4 / 6 axes A-82x ACS-based motion controller for high power requirements, 4 / 6 / 8 axes |
A-81x ACS-based motion controller for medium power requirements, 2 / 4 / 6 axes A-82x ACS-based motion controller for high power requirements, 4 / 6 / 8 axes |
关于加速度和速度的注意事项:给定的值在未加载状态下有效。
关于线性串扰的注意事项:取决于安装载物台的表面的平整度。
最小增量运动注意事项:与系统稳定性(伺服抖动)直接相关;这取决于所使用的伺服驱动器。
关于定位精度的说明:校准精度只能通过控制器驱动的误差补偿来实现。必须通过 PI 的控制器订购载物台才能达到这些值。精度值假定持续时间较短,不考虑热漂移对载物台的长期影响。
关于允许推力和力矩的注意事项:假设空气轴承的工作压力为 480 kPa。
有关传感器分辨率的注意事项:假设使用 4096x 插值。联系 PI 了解其他因素的使用。
工作压力说明:为保护载物台免受损坏,建议将气压传感器连接到控制器的紧急停止输入端。
在 PI,技术数据规定为 22 ±3 °C。 除非另有说明,否则这些值适用于未加载的条件。某些属性是相互依赖的。名称 “typ.” 表示属性的统计平均值;它并不表示所供应的每件产品的保证价值。在产品的最终检验期间,仅分析选定的属性,而不是所有属性。请注意,某些产品特性可能会随着运行时间的增加而恶化。
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com