

PI普爱 V-308 用于物镜的音圈PIFOC聚焦驱动器

PI普爱 V-308 用于物镜的音圈PIFOC聚焦驱动器

用于显微镜物镜的高动态定位器
- 可调行程范围限制,行程总范围为1至7mm
- 高动态直接驱动器
- 集成的重力补偿达1kg,可由用户调整
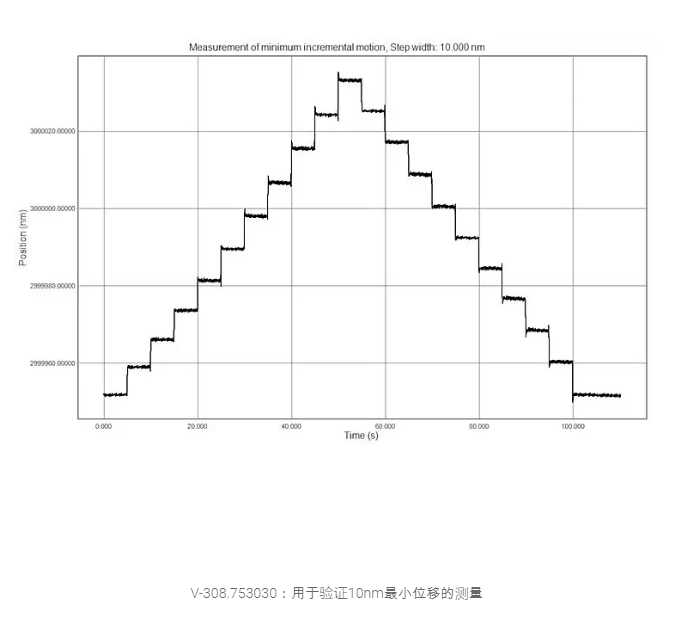
- 最小位移为10nm
- 重载交叉滚柱导轨
- 适合的可选配件,例如:物镜支架
产品描述
使用PIFOC的Z向物镜定位
在许多检查或显微镜技术中,均需要沿Z向(即沿物镜的光轴)定位样本。 或者,也可以沿Z向移动物镜本身。 为此,PI提供了名为PIFOC的解决方案。
集成的重力补偿
该产品具有磁性重力补偿功能。 即使未通电,也可以保持垂直于运动轴对准的高达1kg负载的位置。 重力补偿可由用户调整。
PIMag音圈电机
音圈电机为直接驱动器。 在直接驱动器中,驱动器元件的力直接传递至要移动的负载,而无需使用联接器、传动螺杆或减速齿轮等机械传动元件。 音圈驱动器由位于磁场气隙中的永磁体和绕组体组成。 当电流流过绕组体时,绕组体在永磁体的磁场中移动。 音圈驱动器重量轻并且基于无摩擦驱动原理,因此特别适合在有限行程内要求高动态性和高速度的应用。 这类驱动器还可提供高扫描频率和精密定位,因为它们不存在磁滞效应。
交叉滚柱导轨
对于交叉滚柱导轨,滚珠导轨中的滚珠的接触点被淬火滚柱的线接触取代。 因此,它们的刚度明显提高,需要的预载更小,这减少了摩擦并实现了更平滑的运行。 交叉滚柱导轨还具有高导向精度和高有效载荷的特征。 力导向滚动体保持架防止保持架蠕变。
直接位置测量
以极高的精度直接在运动平台上进行位置测量,因此非线性效应、机械作用或弹性形变不会对位置测量造成影响。
应用领域
显微镜:多光子荧光显微镜、深层组织检查、数字载片扫描显微镜。 生物技术:采用Solexa-Illumina方法进行基因组测序、免疫分析荧光。 医疗设备:扫描激光眼科、自动细胞计数器/流式细胞仪。 生物医学研究:光学和磁性镊子。 激光材料加工:激光微加工、激光烧蚀。 半导体行业:半导体/晶圆检测。
规格
| 运动 | V-308.753030 | 公差 |
|---|---|---|
| 主动轴 | Z | |
| Z向上的行程 | 7 mm | |
| Z向上的加速度,空载 | 8 m/s² | max. |
| Z向上的最大速度,空载 | 200 mm/s | |
| X向上的直线度误差 | ± 0.75 µm | max. |
| Y向上的直线度误差 | ± 0.75 µm | max. |
| 绕X的角度误差 | ± 50 µrad | max. |
| 绕Y的角度误差 | ± 50 µrad | max. |
| 绕Z的角度误差 | ± 50 µrad | max. |
| 定位 | V-308.753030 | 公差 |
| Z向上的最小位移 | 0.01 µm | typ. |
| Z向上的已校准定位精度 | ± 0.6 µm | typ. |
| Z向上的未校准定位精度 | ± 4 µm | typ. |
| Z向上的双向重复精度 | 1 µm | typ. |
| Z向上的双向重复精度,步长为100nm | 50 nm | |
| 参考点开关 | 光学、方向感应(参考边缘跟踪),5V,TTL | |
| 参考点开关重复精度 | 0.5 µm | |
| 集成传感器 | PIOne:增量直线光栅尺 | |
| 传感器信号 | 正弦/余弦,1Vpp | |
| 传感器信号周期 | 2 µm | |
| Z向上的系统分辨率 | 1 nm | |
| 传感器分辨率 | 1 nm | |
| Z向上的位置噪声 | 3 nm | max. |
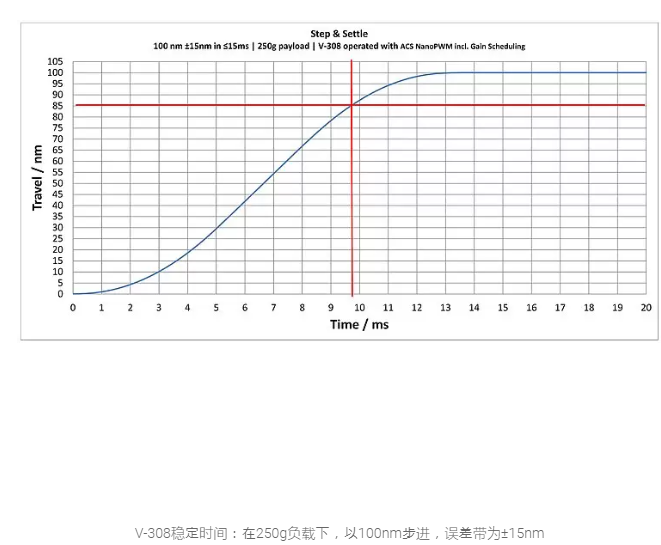
| Z向上的稳定时间(100nm步长,±15nm误差带) | 15 ms | |
| Z向上的稳定时间(250nm步长,±15nm误差带) | 15 ms | |
| 驱动性能 | V-308.753030 | 公差 |
| 驱动类型 | 音圈 | |
| 标称电压 | 48 V | |
| 标称电流,均方根 | 1.15 A | typ. |
| 峰值电流,均方根 | 3.5 A | typ. |
| Z向上的正向运动的驱动力 | 4.2 N | typ. |
| Z向上的负向运动的驱动力 | 4.2 N | typ. |
| Z向上的正向运动的峰值力 | 9.45 N | |
| Z向上的负向运动的峰值力 | 9.45 N | |
| 力常数 | 2.7 N/A | |
| 电机常数 | 1.37 N/√W | typ. |
| 相间电阻 | 3.9 Ω | typ. |
| 相间电感 | 0.85 mH | |
| 反电动势 | 2.7 V·s/m | max. |
| 驱动元件的允许最高温度 | 50 °C | |
| 机械性能 | V-308.753030 | 公差 |
| X向上的允许推力 | 10 N | max. |
| Y向上的允许推力 | 10 N | max. |
| Z向上的允许推力 | 10 N | max. |
| Z向上的移动质量,空载 | 200 g | |
| 导轨 | 交叉滚柱导轨 | |
| 总质量 | 600 g | |
| 不含电缆的质量 | 450 g | |
| 材料 |
铝,阳极氧化 |
|
| 其他 | V-308.753030 | 公差 |
| 工作温度范围 | 10至50 °C | |
| 连接器 | HD D-sub 26针(公头) | |
| 电缆长度 | 1.5 m | |
| 推荐控制器/驱动器 |
C-414、G-910、ACS SPiiPlus + NPMpm(含NanoPWM) |
关于传感器分辨率和最小位移的说明:细分为211时,带有C-414运动控制器
关于稳定时间的说明:有增益调度功能(仅适用于NanoPWM)
关于定位精度和重复精度的说明:符合ISO 230-2标准
关于额定电流和峰值电流的说明: 70°C线圈温度下最大值为10s
关于额定电流(均方根)的说明:无冷却时的值;有冷却时:1.55A;带水平对齐的定位器,带有钢制穿孔板,200mm×250mm×12mm
关于电感的说明:在100mHz频率下的值
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com