PI普爱 H-825 六轴六足位移台

PI普爱 H-825 六轴六足位移台
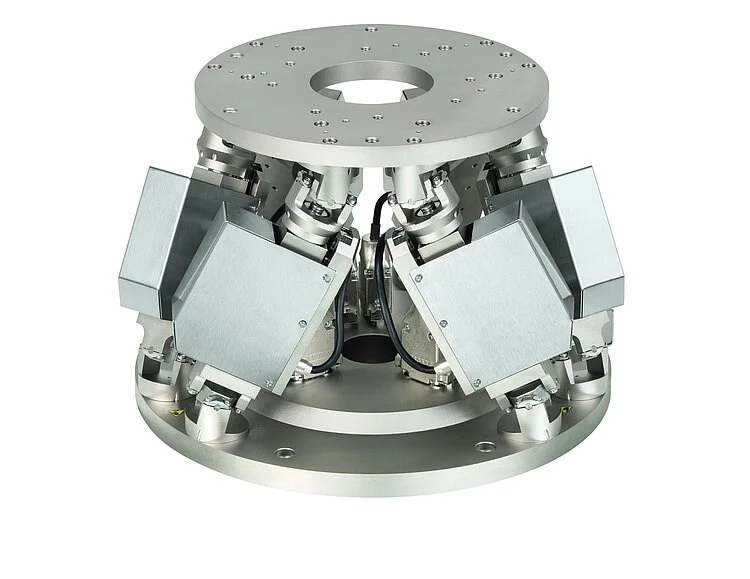
H-825 六轴六足位移台
紧凑型设计,可负载达30公斤
- 负载能力达30公斤,自锁
- 行程达±27.5毫米,旋转范围达±11.5度
- X、Y和Z向上的最小位移达0.25微米
- 重复性达±0.1微米/±2微弧度
- 无刷直流电机和绝对编码器
产品描述
六自由度并联运动设计使其比串联运动系统更加紧凑、更具刚性,动态范围更大,无移动电缆:更稳定、摩擦更小
绝对编码器
绝对编码器提供明确的位置信息,帮助即刻确定位置。这意味着在接通期间无需定位,提高了操作过程中的效率和安全性。
无刷直流电机(BLDC)
无刷直流电机尤其适合高旋转速度。能够精确对其进行控制并确保高精度。由于无滑动接触,可无磨损地平稳运行,因此能够实现较长的使用寿命。
应用领域
科研和工业. 用于微型装配、生物技术、半导体制造、光学对准。
规格
|
运动和定位 |
H-825.G2A |
H-825.D2A |
单位 |
公差 |
|---|---|---|---|---|
|
|
带绝对编码器的无刷直流齿轮电机 |
带绝对编码器的无刷直流电机 |
|
|
|
主动轴 |
X,Y,Z,θX,θY,θZ |
X,Y,Z,θX,θY,θZ |
|
|
|
X、Y向上的行程* |
±27.5; ±25 |
±27.5; ±25 |
毫米 |
|
|
Z向上的行程* |
±14 |
±14 |
毫米 |
|
|
θX、θY向上的行程* |
±11.5; ±10.5 |
±11.5; ±10.5 |
° |
|
|
θZ向上的行程* |
±19 |
±19 |
° |
|
|
促动器设计分辨率 |
0.008 |
0.25 |
微米 |
|
|
X、Y和Z向上的最小位移 |
0.3; 0.3; 0.25 |
1; 1; 0.5 |
微米 |
典型值 |
|
θX、θY、θZ向上的最小位移 |
3.5; 3.5; 4 |
7; 7; 12 |
微弧度 |
|
|
X、Y向上的空回 |
3 |
1.5 |
微米 |
典型值 |
|
Z向上的空回 |
1 |
1 |
微米 |
典型值 |
|
θX、θY向上的空回 |
20 |
15 |
微弧度 |
典型值 |
|
θZ向上的空回 |
25 |
25 |
微弧度 |
典型值 |
|
X、Y向上的重复精度 |
±0.5; ±0.25 |
±0.5 |
微米 |
典型值 |
|
Z向上的重复精度 |
±0.1 |
±0.15 |
微米 |
典型值 |
|
θX、θY向上的重复精度 |
±2 |
±2; ±1.5 |
微弧度 |
典型值 |
|
θZ向上的重复精度 |
±2.5 |
±3 |
微弧度 |
典型值 |
|
X、Y和Z向上的最大速度 |
2.5 |
25 |
毫米/秒 |
|
|
θX、θY和θZ向上的最大速度 |
27 |
270 |
毫弧度/秒 |
|
|
X、Y和Z向上的典型 速度 |
2 |
20 |
毫米/秒 |
|
|
θX、θY和θZ向上的典型 速度 |
5.5 |
55 |
毫弧度/秒 |
|
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com