
Panasonic松下 SV 图像传感器







Panasonic松下 SV 图像传感器
松下电器机电图像处理机中的高性价比产品
改变图像处理机安装流程的一体型图像传感器SV系列
|

 |
 |
 |
 |
 2020年6月 新增产品阵容。
2020年6月 新增产品阵容。
新增500万像素(彩色/黑白)、300万像素(彩色/黑白)、120万像素(彩色)产品。
特点
高速拍摄/高速处理/高速输出
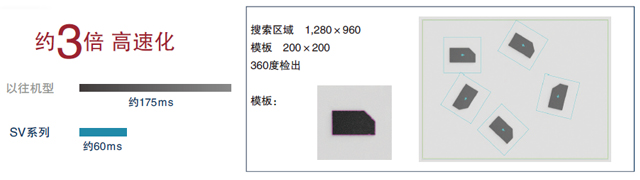
出类拔萃的高速性※
SV系列在小巧的机身中搭载高速CMOS传感器、双核CPU、Gigabit Ethernet,凭借出类拔萃的高速拍摄和独创的算法,实现高速检查。
此外,通过高速图像压缩与高速图像输出,有助于构筑追溯性所需的“检查图像全部保存”的实现。
※:2021年10月本公司调查结果。
|

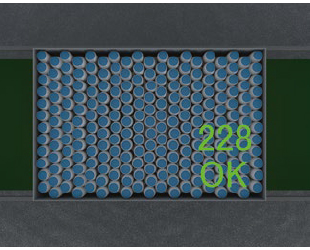
[应用示例]
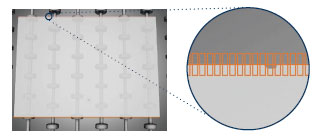
电子零件的方向检查
通过灰度边缘的方向和面积值判断载带内电子零件的方向
|
![[应用示例]电子零件的方向检查](https://device.panasonic.cn/ac/c/fasys/vision/vis_sensor/sv/images/pic03.jpg)
检查图像的高速保存
|
[BEFORE] 以往方式(单任务)以往方式的图像处理机以单任务方式在执行检查后进行图像的压缩,因此图像压缩在减少通信时间方面的优点没有得到充分发挥。 [AFTER] SV系列(多任务)凭借Dual Core CPU,能够在检查的同时以多任务方式进行JPEG文件图像压缩。可以大幅缩短到输出为止的时间。有助于实现检查图像的全部保存。
|
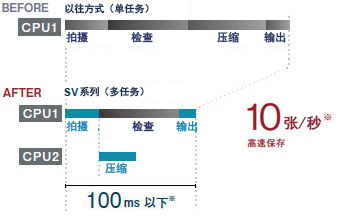 ※:120万像素、JPEG压缩时的代表值。 |
“灵活”实现需要实施的检查
丰富的检查功能
|
可以根据目的进行选择的"简单设定"根据用途,可以通过以下2种方式进行设定。
|
 |
|

[「灵活」实现需要实施的检查]
检查功能/检查示例
| 轮廓匹配 |
|---|
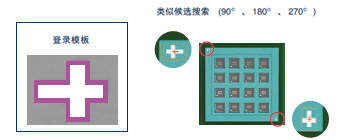
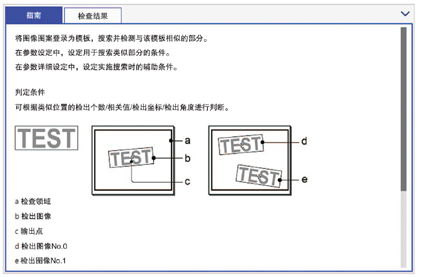
将需检测图像的轮廓信息登录为模板,搜索并检测与该模板相似的部分。
搭载可不受检测对象的缺口等影响而检测正确位置的算法,可以对检出个数、相关值、检出坐标、检出角度、标尺等 进行OK/NG判断。
|
|
轮廓匹配 类似候选搜索功能
|
 |
| 智能边缘(线) |
|---|
|
根据使用多个单元检出的坐标值,计算近似直线。用于工件的位置及倾斜的位置补偿、毛刺/缺口、变形、起伏的判定。 |
 |
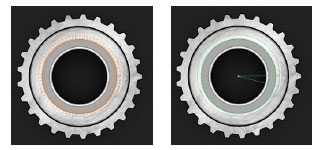
| 智能边缘(圆) |
|---|
|
使用多个单元检出圆形对象物的边缘,可算出对象物的半径、直径和中心点。用于工件的位置及倾斜的位置补偿、毛刺/缺口、变形的判定。 |
 |
| 色彩窗口 |
|---|
|
可以进行基于RGB、HSV(色相、彩度、亮度)色彩空间的彩色检查。计算区域内的RGB值或HSV值的最大值、最小值、平均值、标准偏差,并对该值进行OK/NG判定。 |
 |
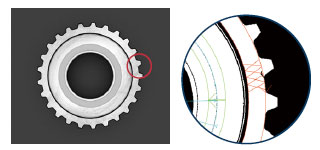
| 伤痕检查 |
|---|
|
根据伤痕的面积和灰度差,判定有无小伤痕、毛边、缺口、异物等。 |
 |
[「灵活」实现需要实施的检查]
画像加工
即使是照明不均匀或产生干扰的图像,也可实现更稳定的检查。
可以分别在画面上与原始图像进行比较,同时进行图像加工的操作。
|
预处理滤波器图像的统一显示一览显示应用预处理滤波器(20种)后的图像。可以迅速地选择对需要实施的检查适合的预处理。
|
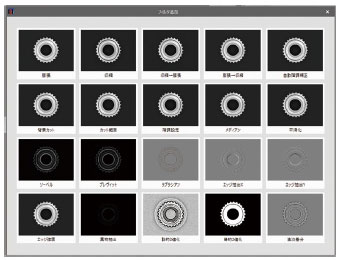 |
| 主要目的 | 滤波器名称 |
|---|---|
| 缺损提取 | ・异物提取 ・灰度差分 ・动态2值化 ・静态2值化 |
| 干扰去除 | ・膨胀 ・收缩→膨胀 ・收缩 ・膨胀→收缩 |
| 轮廓强调 | ・索贝尔 ・拉普拉斯 ・普鲁伊特 ・边缘强调 ・边缘提取X ・边缘提取Y |
| 模糊 | ・中值 ・平滑化 |
| 对比度改善 | ・自动色阶补偿 ・裁剪范围 ・背景裁剪 ・色阶设定 |
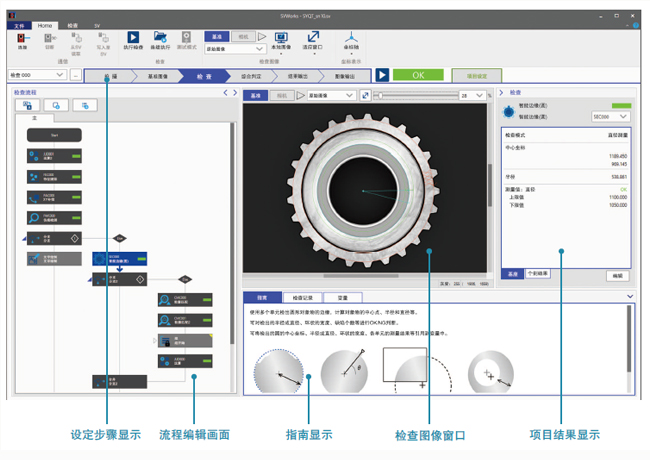
[「灵活」实现需要实施的检查 ]
设定工具 SVWorks
在尽力排除图像处理相关专业术语的操作画面中,在「指南显示」中显示设定内容的说明。 采用高性能图像处理机中搭载的流程图方式程序,为需要实施的检查的设定提供辅助。
只需按「设定步骤显示」的顺序一步步进行设定,即可轻松设定检查项目乃至输出设定。
>>SVWorks的详情请阅览「软件」页
|
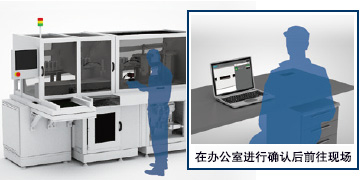
[通过远程的设定、监控实现IoT]
SV Web Console & 数据 R/W(读/写)功能
|

|
|

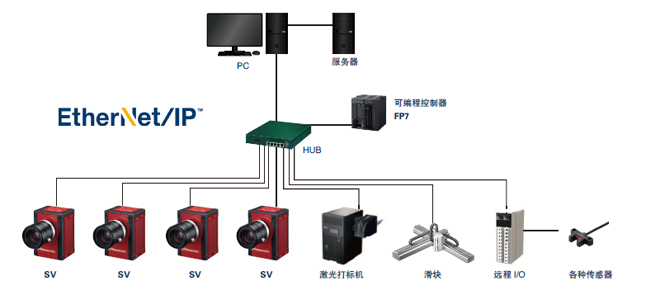
EtherNet/IP对应
SV系列支持开放式网络EtherNet/IP。
只需简单的设定,即可从高位PLC通过高速通信进行控制。
|
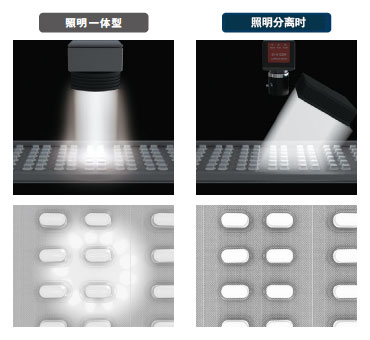
内置照明电源
|
小巧机身中内置照明电源(10W)。固定型(照明一体型相机)的照明在正反射时会拍摄到照明光源,有时会无法顺利拍摄,或无法反映对比度。 |
 |
用途
彩色型
|
|

|
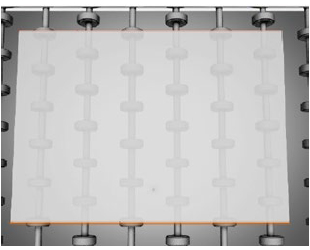
单色型
|
|
|
系统构成
|
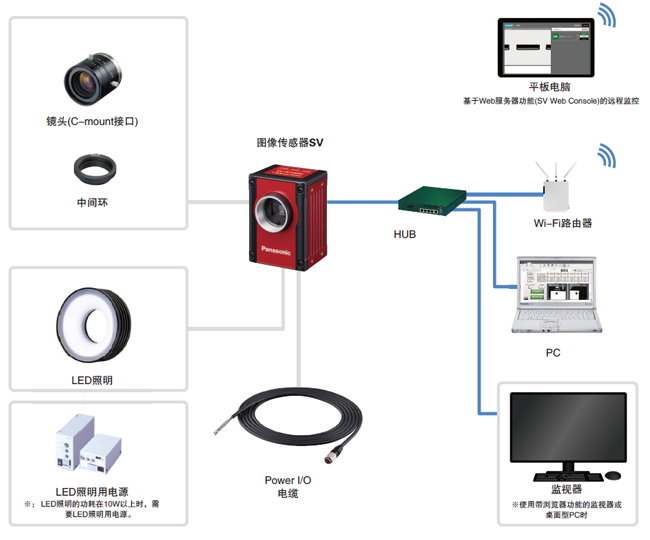
| (注1) | : | Web服务器功能(SV Web Console)实现远程监控。 |
|---|---|---|
| (注2) | : | 需要LED照明用电源、LED照明的消耗功率10W以上时。 |
| (注3) | : | 使用带浏览器功能的监控器或者桌面型PC。 |
种类
硬件构成
|

型号一览
本体
| 项目 | 规格 | 型号名称(注1) |
|---|---|---|
| 图像传感器 | 1.2M彩色型 | SV-N120C |
| 3M彩色型 | SV-N300C |
|
| 5M彩色型 | SV-N500C |
|
| 1.2M黑白型 | SV-N120M | |
| 3M黑白型 | SV-N300M |
|
| 5M黑白型 | SV-N500M |
| (注1) | : | 去掉型号中的"U",再在开头加上"-"后即为订购编号。 |
|---|
电缆
| 项目 | 规格 | 型号(注1) |
|---|---|---|
| Power I/O电缆 | 耐弯曲 3m型 | SV-HP03R |
| 耐弯曲 5m型 | SV-HP05R | |
| 耐弯曲 10m型 | SV-HP10R | |
| 耐弯曲 20m型 | SV-HP20R |
| (注1) | : | 去掉型号中的"U",再在开头加上"-"后即为订购编号。 |
|---|
镜头
| 项目 | 规格 | 订货产品号 |
|---|---|---|
| 百万像素照相机用镜头 | f=16 带C Mount接口镜头 | ANPVL162 |
| f=25 带C Mount接口镜头 | ANPVL252 | |
| f=50 带C Mount接口镜头 | ANPVL502 |
中间环 (注1)
| 项目 | 规格 | 订货产品号 |
|---|---|---|
| C带锁/CS带锁透镜共用 | 环套(40, 20, 10, 5, 1, 0.5mm 各1个) | ANB848 |
| 5mm中间环 1个 | ANB84805 |
| (注1) | : | 购买图像传感器时,附带中间环(1mm×2个、0.5mm×1个)。 |
|---|
Ethernet电缆推荐产品指南
请使用市售的Ethernet电缆。
设想Ethernet连接器部承受负载或振动时,或在可动部位使用时,请使用单侧带锁紧螺丝的Ethernet电缆。
冲电线株式会社制
型号 : C5e(S-HFR)(K)-HSL-**
注意事项:有关推荐产品的详情,请向制造商咨询。
规格
一般规格
| 产品名称 | 图像传感器 |
|---|---|
| 型号 | SV-N120C / SV-N300C / SV-N500C / SV-N120M / SV-N300M / SV-N500M |
| 额定电压 | 24V DC |
| 容许电压范围 | 21.6~26.4V DC(含脉动) 连接LED照明时 : 22.8~26.4V DC |
| 额定消耗电流 | 0.5A以下(连接LED照明时 : 1.0A以下)(注2) |
| 使用环境温度 | 0~+45℃(注意不可结露、结冰) |
| 存储环境温度 | -20~+60℃ (注意不可结露、结冰) |
| 使用环境湿度 | 35~85%RH (+25℃时。注意不可结露、结冰) |
| 存储环境湿度 | 35~85%RH (+25℃时。注意不可结露、结冰) |
| 抗干扰性 | 1,000V 脉冲宽度 50ns / 1μs( 依据噪声模拟器法) |
| 耐振动 | 10~55 Hz 扫描速度1个倍频程/min. 双振幅0.75mm或最大加速度49m/s2 X、Y、Z方向各2小时 |
| 耐冲击 | 196m/s2 X、Y、Z 各方向5次 |
| 绝缘电阻 (初始值) |
100MΩ以上(使用500V DC 绝缘电阻计)(注1) 所有输入端子、输出端子 - 所有电源端子、功能接地 所有输入端子、输出端子 - 非充电金属部 电源端子 - 非充电金属部 |
| 耐电压 (初始值) |
500V AC / 1分钟(600V AC / 1秒) 截止电流10mA(注1) 所有输入端子、输出端子 - 所有电源端子、功能接地 所有输入端子、输出端子 - 非充电金属部 电源端子 - 非充电金属部 |
| 污损度 | 2 |
| 使用海拔 | 2,000m以下 |
| 过电压类别 | 类别I |
| 适用标准 以及认证 |
CE标志(EMC指令、RoHS指令)、UKCA标志(EMC标准、RoHS标准)、韩国电波法、TUV Rheinland认证 |
| 重量 | 约200g |
| 附件 | 保护盖 : 1个、 中间环 [t=0.5mm : 1、t=1mm : 2] : 1套 绝缘底座 : 1个、绝缘底座安装螺丝 : 4个 施工说明书(日语 / 英语、中文) : 各1份 General Information for Safety, Compliance, and Instructions(23国语言):1份 |
| (注1): | 本项评估是在拆下设备内部电路电源一次侧变阻器和电容器状态下实施的。 |
|---|---|
| (注2): | 请准备内置保护电路的电源容量3A以上的绝缘型DC电源。 |
照相机的规格
| 产品名称 | 图像传感器 | ||
|---|---|---|---|
| 型号 | SV-N120M / SV-N120C | SV-N300M / SV-N300C | SV-N500M / SV-N500C |
| 摄像元件 | 120万像素 1/2型黑白CMOS传感器 (SV-N120C为彩色CMOS传感器) |
300万像素 1/1.8型黑白CMOS传感器 (SV-N300C为彩色CMOS传感器) |
500万像素 2/3型黑白CMOS传感器 (SV-N500C为彩色CMOS传感器) |
| 像素 | 水平1,280像素×垂直960像素 | 水平2,048像素×垂直1,536像素 | 水平2,432像素×垂直2,048像素 |
| 像素尺寸 | 4.8×4.8μm | 3.45×3.45μm | |
| 传输速度 | 最快4.8ms(120万像素拍摄时) | 最快8.1ms(300万像素拍摄时) | 最快12.5ms(500万像素拍摄时) |
| 镜头接口 | C-mount接口 | ||
| 法兰距 | 17.526mm | ||
| S / N | 50dB | ||
| 快门速度 | 10μs~100ms(能以10μs为单位设定) | 20μs~100ms(能以10μs为单位设定) | |
| 相机增益 | 彩色CMOS传感器 : 1.0~4.0、 黑白CMOS传感器 : 1.0~40.0 | ||
| 黑电平 | 0~64 | ||
| 拍摄延迟时间 | 0.0~999.9ms | ||
| FLASH信号 延迟时间 |
0.0~999.9ms ※取决于所使用的FLASH(闪光灯)照明。 |
||
功能规格
| 产品名称 | 图像传感器 | |
|---|---|---|
| 型号 | SV-N120C / SV-N300C / SV-N500C / SV-N120M / SV-N300M / SV-N500M |
|
| 处理方法 | 灰度处理 / 2值化处理/ 彩色处理(仅型号末尾带 有“C”的机型支持) | |
| 检查设定数 | 最多设定256个检查(取决于检查内容)(注1) | |
| 拍摄场景数 | 64个场景 | |
| 基准图像数 | 80张/1个检查设定 | |
| 登录项目数 | 700个项目/1个检查设定 | |
| 变量 | 本地 | 数值变量 : 最多200个 |
| 字符串变量 : 最多100个 | ||
| 数组变量 : 最多30个 (数组长度 最大1,000个) |
||
| 全局 | 数值变量 : 最多100个 | |
| 检查功能 | 2值化窗口/浓淡窗口/2值化边缘/灰度边缘/特征抽出/模式匹配/伤痕检测/智能边缘(圆)/智能边缘(线)/ 轮廓匹配/色彩窗口(仅型号末尾带有“C”的 机型支持) | |
| 几何运算 | 2点间距离、2直线交点、2直线的中线、垂线距离、 近似直线、近似圆、近似椭圆、圆与直线 | |
| 位置、区域补偿 | 参照1点、参照2点、参照1线、参照2线、自动区域设定 | |
| 运算 | 四则运算(+、-、×、÷)、括号、14种三角函数、 6种比较函数、10种算术函数、5种统计函数、18种几何学函数 | |
| 流程控制功能 | 分支、跳跃到END、I/O、循环、WAIT | |
| 画像加工 | 20种灰度滤波器 (膨胀、收缩、收缩→膨胀、膨胀→收缩、自动色阶补偿、背景裁剪、裁剪范围、色阶设定、中值、平滑化、索贝尔、普鲁伊特、拉普拉斯、边缘提取X、边缘提取Y、边缘强调、异物提取、动态2值化、静态2值化、灰度差分、灰度转换(仅型号末尾带有“C”的机型支持)、颜色提取(仅型号末尾带有“C”的机型支持) |
|
| 登录模板数 | 最多2,000个 | |
| 记录图像保持数 | 最多1,001张(取决于像素数) | |
| 绘图功能 | 绘图、文字绘制 | |
| 校准功能 | 系数计算、坐标转换 | |
| FTP客户端功能 | 连接对象:1 支持匿名访问 用户登录数:1 支持密码 数据写入方法:追加写入/写入1个文件 |
|
| 账户设定 | 用户种类:管理者 / 一般(登录数最多5个) 用户名、密码、访问级别:0 / 1 / 2 |
|
| (注1): | 本体内存中可保存的检查设定数随项目的内容而变。 |
|---|---|
| (注2): | 用于保存项目的本体内存使用的是非易失性存储器。请勿连续进行写入。 |
输入・输出规格(I/O)
| 产品名称 | 图像传感器 | |
|---|---|---|
| 型号 | SV-N120C / SV-N300C / SV-N500C / SV-N120M / SV-N300M / SV-N500M |
|
| 接口 | Power I/O电缆(15P)(注1) | |
| 触发输入 | 触发输入×1点 (双向光耦绝缘: TRG-IN / TRG-COM) |
|
| 输入 | 功能 | 通用输入×4点(IN0-IN3)(注2) |
| 输入形式 | 无电压接点或开路集电极晶体管 (NPN或PNP)(注3) |
|
| 输出 | 功能 | READY输出×1点 ERROR输出×1点 通用输出×2点(OUT2 / OUT3)(注2) |
| 输出形式 | 开路集电极晶体管输出 (NPN或PNP)(注3) |
|
| (注1): | 连接本体的Power I/O电缆请使用本公司指定的产品SV-HP□R(另售)。 使用非本公司指定的产品造成故障、破损、损坏时,将不在保修范围内。 |
|---|---|
| (注2): | 通用输入4点(IN0-IN3)、通用输出2点(OUT2 / OUT3)的功能可通过SVWorks进行设定。 |
| (注3): | 输入4点(IN0-IN3)的输入形式、输出4点(OUT0 READY / OUT1 ERROR /OUT2 / OUT3)的输出形式可通过SVWorks进行设定。输入4点、输出4点统一进行设定。不能单独设定。 |
通信规格(Ethernet)
| 产品名称 | 图像传感器 |
|---|---|
| 型号 | SV-N120C / SV-N300C / SV-N500C / SV-N120M / SV-N300M / SV-N500M |
| 接口 | 1,000BASE-T / 100BASE-TX / 10BASE-TX RJ45×1端口 |
| 通信速度 | 1,000Mbps、100Mbps、10Mbps 自动协商(注1) |
| 传输方式 | 基带 |
| 电缆长度 | 100m以下 |
| 通信电缆 | 类别5e级以上 |
| 工业用协议 | 支持EtherNet/IP适配器 |
| (注1): | 通过自动协商功能,自动进行速度切换。 |
|---|---|
| (注2): | Ethernet是富士施乐株式会社的注册商标。 |
| (注3): | 请使用市售的Ethernet电缆。 |
通信规格(RS-232C)
| 产品名称 | 图像传感器 | |
|---|---|---|
| 型号 | SV-N120M | |
| 接口 | RS-232C 3线式(非绝缘)×1通道 使用Power I/O电缆(15P)中的3线 |
|
| 传输距离(注1) | 15m | |
| 通信形态 | 1:1通信 | |
| 通信方式 | 半双工方式 | |
| 同步方式 | 起止同步方式 | |
| 通信速度 | 1,200、2,400、4,800、9,600、19,200、38,400、57,600、115,200bps(注2) | |
| 传输 格式 |
数据长度 | 7bit、8bit |
| 奇偶 | 无、奇数、偶数 | |
| 停止位 | 1bit、2bit | |
| 终端代码 | CR | |
| 流程控制 | 无 | |
| 通信功能 | 基于专用协议的通用通信 | |
| (注1): | 以「38,400bps」以上的通信速度进行通信时,请将电缆长度控制在3m以下。 |
|---|---|
| (注2): | 以「115,200bps」的通信速度使用时,可能会因对象设备导致通信不稳定。此时,请将通信速度设为「57,600bps」以下。 |
| (注3): | 通信速度、传输格式通过SVWorks进行设定。 |
| (注4): | 与市售设备连接时,请通过实际设备进行确认。 |
LED照明电源规格
| 产品名称 | 画像传感器 |
|---|---|
| 型号 | SV-N120C / SV-N300C / SV-N500C / SV-N120M / SV-N300M / SV-N500M |
| 输出电压 | 24V DC |
| 输出容量 | 10W以下(24V、0.4A) |
| 点亮时间 | 与快门同步 |
设定软件SVWorks工作环境
| OS | Windows® 8 / Windows® 8.1 / Windows® 10 / Windows® 11(Ver.2.1.3以后)(注1) |
|---|---|
| 推荐CPU | Intel ®Core™ 2 Duo 2GHz以上(注2) |
| 推荐搭载内存 | 1GB以上 |
| 所需硬盘容量 | 400MB以上 (不含保存项目数据和图像数据的容量。) |
| 推荐画面分辨率 | 1,280×800以上 (使用SVWorks过程中,请勿变更PC显示器的分辨率。) |
| 对象机型 | SV系列 |
| (注1): | Windows®是美国Microsoft Corporation在美国及其他国家的注册商标或商标。 |
|---|---|
| (注2): | Intel ®Core™是Intel Corporation或其子公司在美国及其他国家的商标或注册商标。 |
Image Receiver(Ver.2.10)动作环境
| OS | Windows® 8 / Windows® 8.1 / Windows® 10 / Windows® 11(Ver.2.11以后)(注1) |
|---|---|
| 推荐CPU | Intel ®Core™ 2 Duo 2GHz以上(注2) |
| 推荐搭载内存 | 1GB以上 |
| 所需硬盘容量 | 400MB以上(注3) |
| 推荐画面分辨率 | 1,280×800以上 |
| 对象机型 | SV 系列(注4) / PV 系列[PV200 / PV230 / PV240 / PV260 / PV310 / PV500] |
| (注1): | Windows®是美国Microsoft Corporation在美国及其他国家的注册商标或商标。 |
|---|---|
| (注2): | Intel ®Core™是Intel Corporation或其子公司在美国及其他国家的商标或注册商标。 |
| (注3): | 不含保存图像数据的容量。 |
| (注4): | 要使用SV系列,需要Ver.2.1以上的版本。 |
视野表
SV-N120M / SV-N120C
| 镜头/ 视野 |
ANPVL502 (f=50) |
ANPVL252 (f=25) |
ANPVL162 (f=16) |
分辨率 (μm/像素) |
|||||
|---|---|---|---|---|---|---|---|---|---|
| 垂直 (mm) |
水平 (mm) |
WD (mm) |
中间环 (mm) |
WD (mm) |
中间环 | WD (mm) |
中间环 (mm) |
垂直 | 水平 |
| 1.00 | 1.33 | 31 | 230.0 | - | - | - | - | 1.0 | 1.0 |
| 2.00 | 2.67 | 42 | 115.0 | - | - | - | - | 2.1 | 2.1 |
| 3.00 | 4.00 | 53 | 76.5 | - | - | - | - | 3.1 | 3.1 |
| 4.50 | 6.00 | 69 | 51.0 | - | - | - | - | 4.7 | 4.7 |
| 5.00 | 6.67 | 74 | 46.0 | - | - | - | - | 5.2 | 5.2 |
| 7.50 | 10.00 | 102 | 30.5 | - | - | - | - | 7.8 | 7.8 |
| 10.00 | 13.33 | 129 | 15.0 | 40 | 11.5 | - | - | 10.4 | 10.4 |
| 12.50 | 16.67 | 156 | 15.0 | 53 | 7.5 | - | - | 13.0 | 13.0 |
| 15.00 | 20.00 | 184 | 15.0 | 67 | 7.5 | - | - | 15.6 | 15.6 |
| 20.00 | 26.67 | 238 | 11.5 | 94 | 5.5 | 55 | 2.5 | 20.8 | 20.8 |
| 30.00 | 40.00 | 347 | 7.5 | 149 | 2.0 | 89 | 2.0 | 31.3 | 31.3 |
| 40.00 | 53.33 | 457 | 5.5 | 203 | 2.0 | 124 | 1.5 | 41.7 | 41.7 |
| 50.00 | 66.67 | 566 | 2.0 | 258 | 2.0 | 158 | 1.0 | 52.1 | 52.1 |
| 75.00 | 100.00 | 839 | 2.0 | 394 | 1.5 | 245 | 0.5 | 78.1 | 78.1 |
| 100.00 | 133.33 | 1,112 | 2.0 | 530 | 1.0 | 331 | 0.0 | 104.2 | 104.2 |
| 150.00 | 200.00 | 1,658 | 1.5 | 802 | 0.5 | 504 | 0.0 | 156.3 | 156.3 |
| 200.00 | 266.67 | 2,204 | 1.0 | 1,075 | 0.5 | 676 | 0.0 | 208.3 | 208.3 |
| 250.00 | 333.33 | 2,749 | 1.0 | 1,347 | 0.0 | 849 | 0.0 | 260.4 | 260.4 |
| 300.00 | 400.00 | 3,295 | 0.5 | 1,620 | 0.0 | 1,022 | 0.0 | 312.5 | 312.5 |
| 350.00 | 466.67 | 3,841 | 0.5 | 1,892 | 0.0 | 1,194 | 0.0 | 364.6 | 364.6 |
| 400.00 | 533.33 | 4,387 | 0.5 | 2,165 | 0.0 | 1,367 | 0.0 | 416.7 | 416.7 |
| 450.00 | 600.00 | 4,933 | 0.5 | 2,437 | 0.0 | 1,539 | 0.0 | 468.8 | 468.8 |
| 500.00 | 666.67 | 5,479 | 0.5 | 2,709 | 0.0 | 1,712 | 0.0 | 520.8 | 520.8 |
| 600.00 | 800.00 | 6,571 | 0.0 | 3,254 | 0.0 | 2,057 | 0.0 | 625.0 | 625.0 |
| 700.00 | 933.33 | 7,663 | 0.0 | 3,799 | 0.0 | 2,402 | 0.0 | 729.2 | 729.2 |
| 800.00 | 1,066.67 | 8,755 | 0.0 | 4,344 | 0.0 | 2,748 | 0.0 | 833.3 | 833.3 |
| 900.00 | 1,200.00 | 9,847 | 0.0 | 4,889 | 0.0 | 3,093 | 0.0 | 937.5 | 937.5 |
| 1,000.00 | 1,333.33 | 10,938 | 0.0 | 5,433 | 0.0 | 3,438 | 0.0 | 1,041.7 | 1,041.7 |
WD = 从透镜前端到对象物体的距离
表中的值为焦点位置∞附近的数值。
SV-N300M / SV-N300C
| 镜头 / 视野 |
ANPVL502 (f=50) |
ANPVL252 (f=25) |
ANPVL162 (f=16) |
分辨率 (μm/画素) |
|||||
|---|---|---|---|---|---|---|---|---|---|
| 垂直 (mm) |
水平 (mm) |
WD (mm) |
中间环 (mm) |
WD (mm) |
中间环 | WD (mm) |
中间环 (mm) |
垂直 | 水平 |
| 1.50 | 2.00 | 35 | 176.5 | - | - | - | - | 1.0 | 1.0 |
| 2.25 | 3.00 | 42 | 118.0 | - | - | - | - | 1.5 | 1.5 |
| 3.00 | 4.00 | 49 | 88.5 | - | - | - | - | 2.0 | 2.0 |
| 3.75 | 5.00 | 56 | 70.5 | - | - | - | - | 2.4 | 2.4 |
| 5.63 | 7.50 | 74 | 47.0 | - | - | - | - | 3.7 | 3.7 |
| 7.50 | 10.00 | 91 | 35.5 | - | - | - | - | 4.9 | 4.9 |
| 9.38 | 12.50 | 109 | 28.5 | - | - | - | - | 6.1 | 6.1 |
| 11.25 | 15.00 | 127 | 23.5 | 35 | 12.0 | - | - | 7.3 | 7.3 |
| 15.00 | 20.00 | 162 | 17.5 | 53 | 9.0 | - | - | 9.8 | 9.8 |
| 22.50 | 30.00 | 233 | 12.0 | 88 | 6.0 | 51 | 2.0 (注1) |
14.6 | 14.6 |
| 30.00 | 40.00 | 304 | 9.0 | 124 | 2.0 (注2) |
74 | 2.0 (注2) |
19.5 | 19.5 |
| 37.50 | 50.00 | 375 | 7.0 | 159 | 2.0 (注2) |
96 | 2.0 | 24.4 | 24.4 |
| 56.25 | 75.00 | 551 | 2.0 | 248 | 2.0 | 153 | 1.5 | 36.6 | 36.6 |
| 75.00 | 100.00 | 728 | 2.0 | 336 | 2.0 | 210 | 1.0 | 48.8 | 48.8 |
| 112.50 | 150.00 | 1,082 | 2.0 | 513 | 1.0 | 323 | 1.0 | 73.2 | 73.2 |
| 150.00 | 200.00 | 1,436 | 2.0 | 690 | 1.0 | 436 | 0.5 | 97.7 | 97.7 |
| 187.50 | 250.00 | 1,790 | 1.5 | 867 | 0.5 | 549 | 0.5 | 122.1 | 122.1 |
| 225.00 | 300.00 | 2,144 | 1.0 | 1,044 | 0.5 | 662 | 0.5 | 146.5 | 146.5 |
| 262.50 | 350.00 | 2,497 | 1.0 | 1,221 | 0.5 | 776 | 0.5 | 170.9 | 170.9 |
| 300.00 | 400.00 | 2,851 | 1.0 | 1,398 | 0.5 | 889 | 0.5 | 195.3 | 195.3 |
| 337.50 | 450.00 | 3,205 | 1.0 | 1,575 | 0.5 | 1,002 | 0.5 | 219.7 | 219.7 |
| 375.00 | 500.00 | 3,559 | 0.5 | 1,751 | 0.5 | 1,115 | 0.0 | 244.1 | 244.1 |
| 450.00 | 600.00 | 4,267 | 0.5 | 2,105 | 0.5 | 1,342 | 0.0 | 293.0 | 293.0 |
| 487.50 | 650.00 | 4,620 | 0.5 | 2,282 | 0.5 | 1,455 | 0.0 | 317.4 | 317.4 |
| 525.00 | 700.00 | 4,974 | 0.5 | 2,459 | 0.5 | 1,568 | 0.0 | 341.8 | 341.8 |
| 600.00 | 800.00 | 5,682 | 0.5 | 2,813 | 0.0 | 1,795 | 0.0 | 390.6 | 390.6 |
| 675.00 | 900.00 | 6,390 | 0.5 | 3,167 | 0.0 | 2,021 | 0.0 | 439.5 | 439.5 |
| 750.00 | 1,000.00 | 7,097 | 0.5 | 3,521 | 0.0 | 2,248 | 0.0 | 488.3 | 488.3 |
WD = 从透镜前端到对象物体的距离
除标注位置外,表中的值为焦点位置∞附近的数值。
| (注1): | 透镜焦点位置为最近点附近。 |
|---|---|
| (注2): | 透镜焦点位置为中间附近。 |
SV-N500M / SV-N500C
| 镜头 / 视野 |
ANPVL502 (f=50) |
ANPVL252 (f=25) |
ANPVL162 (f=16) |
分辨率 (μm/画素) |
|||||
|---|---|---|---|---|---|---|---|---|---|
| 垂直 (mm) |
水平 (mm) |
WD (mm) |
中间环 (mm) |
WD (mm) |
中间环 | WD (mm) |
中间环 (mm) |
垂直 | 水平 |
| 2.00 | 2.38 | 35 | 176.5 | - | - | - | - | 1.0 | 1.0 |
| 3.00 | 3.56 | 42 | 118.0 | - | - | - | - | 1.5 | 1.5 |
| 4.00 | 4.75 | 49 | 88.5 | - | - | - | - | 2.0 | 2.0 |
| 5.00 | 5.94 | 56 | 70.5 | - | - | - | - | 2.4 | 2.4 |
| 7.50 | 8.91 | 74 | 47.0 | - | - | - | - | 3.7 | 3.7 |
| 10.00 | 11.88 | 91 | 35.5 | - | - | - | - | 4.9 | 4.9 |
| 12.50 | 14.84 | 109 | 28.5 | - | - | - | - | 6.1 | 6.1 |
| 15.00 | 17.81 | 127 | 23.5 | 35 | 12.0 | - | - | 7.3 | 7.3 |
| 20.00 | 23.75 | 162 | 17.5 | 53 | 9.0 | - | - | 9.8 | 9.8 |
| 30.00 | 35.63 | 233 | 12.0 | 88 | 6.0 | 51 | 2.0 (注1) |
14.6 | 14.6 |
| 40.00 | 47.50 | 304 | 9.0 | 124 | 2.0 (注2) |
74 | 2.0 (注2) |
19.5 | 19.5 |
| 50.00 | 59.38 | 375 | 7.0 | 159 | 2.0 (注2) |
96 | 2.0 | 24.4 | 24.4 |
| 75.00 | 89.06 | 551 | 2.0 | 248 | 2.0 | 153 | 1.5 | 36.6 | 36.6 |
| 100.00 | 118.75 | 728 | 2.0 | 336 | 2.0 | 210 | 1.0 | 48.8 | 48.8 |
| 150.00 | 178.13 | 1,082 | 2.0 | 513 | 1.0 | 323 | 1.0 | 73.2 | 73.2 |
| 200.00 | 237.50 | 1,436 | 2.0 | 690 | 1.0 | 436 | 0.5 | 97.7 | 97.7 |
| 250.00 | 296.88 | 1,790 | 1.5 | 867 | 0.5 | 549 | 0.5 | 122.1 | 122.1 |
| 300.00 | 356.25 | 2,144 | 1.0 | 1,044 | 0.5 | 662 | 0.5 | 146.5 | 146.5 |
| 350.00 | 415.63 | 2,497 | 1.0 | 1,221 | 0.5 | 776 | 0.5 | 170.9 | 170.9 |
| 400.00 | 475.00 | 2,851 | 1.0 | 1,398 | 0.5 | 889 | 0.5 | 195.3 | 195.3 |
| 450.00 | 534.38 | 3,205 | 1.0 | 1,575 | 0.5 | 1,002 | 0.5 | 219.7 | 219.7 |
| 500.00 | 593.75 | 3,559 | 0.5 | 1,751 | 0.5 | 1,115 | 0.0 | 244.1 | 244.1 |
| 600.00 | 712.50 | 4,267 | 0.5 | 2,105 | 0.5 | 1,342 | 0.0 | 293.0 | 293.0 |
| 650.00 | 771.88 | 4,620 | 0.5 | 2,282 | 0.5 | 1,455 | 0.0 | 317.4 | 317.4 |
| 700.00 | 831.25 | 4,974 | 0.5 | 2,459 | 0.5 | 1,568 | 0.0 | 341.8 | 341.8 |
| 800.00 | 950.00 | 5,682 | 0.5 | 2,813 | 0.0 | 1,795 | 0.0 | 390.6 | 390.6 |
| 900.00 | 1,068.75 | 6,390 | 0.5 | 3,167 | 0.0 | 2,021 | 0.0 | 439.5 | 439.5 |
| 1,000.00 | 1,187.50 | 7,097 | 0.5 | 3,521 | 0.0 | 2,248 | 0.0 | 488.3 | 488.3 |
WD = 从透镜前端到对象物体的距离
除标注位置外,表中的值为焦点位置∞附近的数值。
| (注1): | 透镜焦点位置为最近点附近。 |
|---|---|
| (注2): | 透镜焦点位置为中间附近。 |
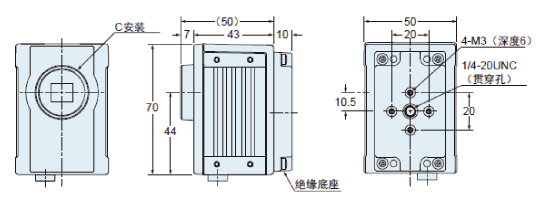
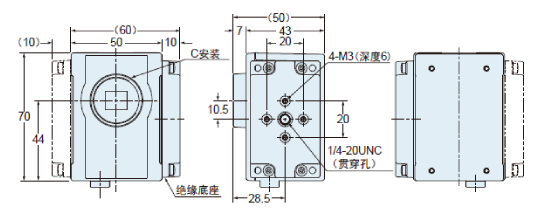
尺寸图
- 单位mm
图像传感器
|

|
|
照相机用镜头
|
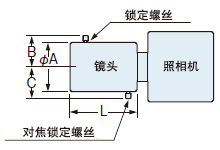
| 百万像素照相机用镜头 | |||
|---|---|---|---|
| f=16 | f=25 | f=50 | |
| ANPVL162 | ANPVL252 | ANPVL502 | |
| F值 | 1.4 | 1.4 | 2.8 |
| øA | 34 | 34 | 34 |
| L | 35.9~38.0 | 47.1~52.2 | 63.0~77.5 |
| B | 22.5 | 22.5 | 22.5 |
| C | 22 | 22 | 22 |
软件
|

在尽力排除图像处理相关专业术语的操作画面中,在「指南显示」中显示设定内容的说明。
采用高性能图像处理机中搭载的流程图方式程序,为需要实施的检查的设定提供辅助。
只需按「设定步骤显示」的顺序一步步进行设定,即可轻松设定检查项目乃至输出设定。
点击进入下载SVWorks软件。
※下载软件需要注册「控制器Web会员」。
>>点击进入下载页面
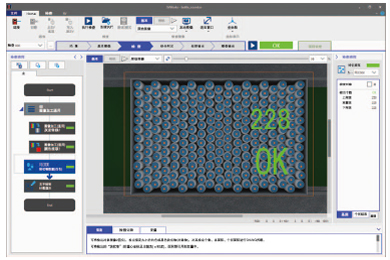
流程编辑画面
在流程编辑画面中,设定需要实施的检查项目的流程。还可在同一品种内编写条件分支和循环设定等复杂的程序,灵活应对用户的检查流程。
|
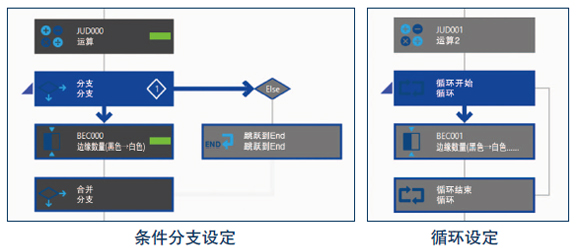
条件分支设定示例
- 发生检查不良时跳过检查后工序
- 分支到各品种的检查流程
循环设定示例
- 发生检查不良时的重试
指南显示
|
根据选择的位置,自动显示设定画面和术语的说明,无需 确认手册即可进行设定。 |
 |
模拟功能
|
可在生产现场使用编写的检查程序、保存图像,离线进行检查的模拟。另外,还可通过连接实际设备,个别确认在程序内设定的所有检查项目的执行时间,因而能根据检查节拍编写适合的检查程序。 |
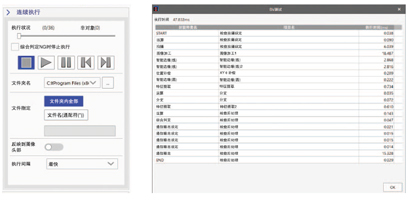 |
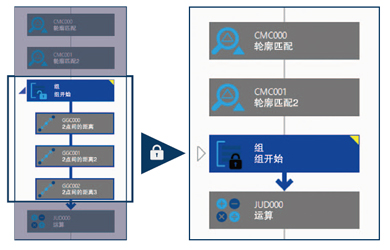
设定流程的部分密码锁定
|
可以对设定流程的一部分进行密码锁定。 |
 |
文字绘制功能
|
可以在检查图像中显示文字、判定字符串、测量值等。可以在检查图像窗口中确认检查结果和检查数值。 |
 文字绘制功能 |
变量列表显示
|

手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com