
Sintec新特 OSSL-SWH-30FC/OSSL-SWH-30FC-V 三维激光焊接头
相关产品

Sintec新特 OSSL-SWH-30FC/OSSL-SWH-30FC-V 三维激光焊接头
典型应用
-
机器人辅助焊接(远程焊接)
-
三维激光应用
-
飞行处理
-
型号: OSSL-SWH-30FC/OSSL-SWH-30FC-V
智能焊接头
专为机器人辅助焊接应用设计的三维扫描系统可以快速准确地将激光束定位在任意的三维轮廓上。在机器人手臂的导引下,该焊接头可以快而准地运动并精确将激光光斑定位到任何一个目标点;其减少了复杂的运动和重复定位,可以将两次焊接之间机器人手臂的定位时间缩短到毫秒级,从而将激光器的运用潜能发挥到极致。
虽然允许30mm的入射光斑,这款焊接头的体积依然小巧,便于安装在机器人手臂上方便焊接任何难以到达的位置。经优化设计的光纤耦合光学系统可承受高达8kW堞片或光纤激光器输出的能量。这款焊接头应用了全数字式驱动技术,高度集成,安全可控,而且还提供实时监控扫描头所有参数状态。独立于软件外的安全互锁装置可以显示设备的任何异常状态。
-
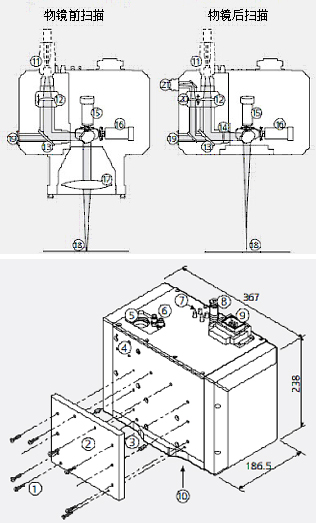
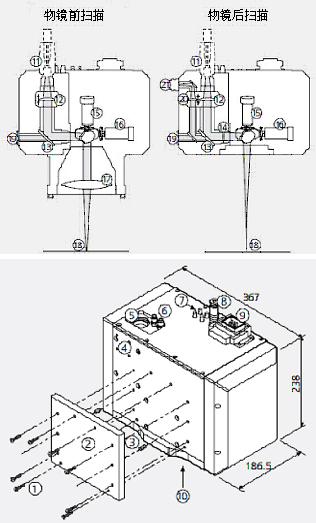
图例(所有单位为mm)
-
1 安装螺栓
-
2 法兰(机器人连接转换片)
-
3 对准针
-
4 光纤接头锁紧配件
-
5 光纤连接配件
-
6 水冷接口
-
7 数据接口
-
8 安全互锁
-
9 电源接口
-
10 物镜座或者保护气喷嘴安装孔
-
11 光纤转接头
-
12 可调准直器
-
13 耦合二色镜
-
14 聚焦镜片
-
15 偏转镜片1
-
16 偏转镜片2
-
17 物镜
-
18 工作面
-
19 连接视觉观察系统
-
20 可调影像跟踪镜片 **
-
21 影像装置连接处 **
-
** 仅限型号 OSSL-SWH-30FC-V
激光束用光纤传导到扫描系统水冷准直器,然后投射到两片运动偏转镜片上。在物镜前扫描系统中,位于出口处的扫描物镜将光束聚焦并投射在工作面上;而在物镜后扫描系统中,光束聚焦是由偏转镜片前的集成聚焦镜片组实现的(如上图)。
可调准直镜片由马达驱动,动态调节准直光束的发散度从而改变整个系统的焦距。扫描头密封安装,前后各有一片窗口镜片保护扫描物镜和出光孔以免除污染。所有型号都配有物镜或者预聚焦镜片。
过程监控
所有扫描系统都可以连接到过程监控设施上,收集从工件表面传出的光或光辐射,并再次耦合回光路,通过附加的监控设备捕获为进一步的分析提供依据。而且OSSL-SWH-30FC-V型号还配有另外一路带有可调图像跟踪镜片组的端口,方便在很大范围内连续调节焦点,从而实现全过程监控。
控制
OSSL-SWH-30FC应用了全数字控制技术,展示了激光和处理过程安全性能的完美集成,也可以实时监控扫描头和两个保护镜片的状态参数。设备的自检测促使了先进的远程诊断技术,独立于软件的安全互锁信号指示系统异常,并且可以将系统转换到一个预定义的状态或者触发自动紧急停止。
可选项
在该焊接扫描系统光束出口一边附有示教指示,大大简化了激光扫描系统的组建工作。两个激光二极管的光经偏转镜片在工件表面投射了一个大的十字和一个小的偏转45度的十字,方便视觉观察激光束焦点位置。两个十字都准确地交叉在工件中心(x = y = z = 0)。
该装置让示教过程中的光学控制变得简单快速,可以方便地检查机器人扫描系统在预定的焊接位置处定位是否正确。
机器人同步是一个为激光焊接系统(激光、焊接头和机器人)设计的中央控制单元。简单直接高效,易于焊接编程(看右图)。
性能指标(所有角度都是光学角度)
| 通用参数 | 波长 | 1030 nm - 1085 nm (1) |
| 最大激光功率(带指定冷却方式) | 8000 W (2) | |
| 准直器特点 | 焦距 | 110 mm |
| 数值孔径限制 | 典型 0.125 (3) | |
| 光纤连接 | QBH, Q5 / LLK-B, QD / LLK-D(其他型号接受定做) | |
| 阶跃响应时间(阶跃调试,稳定到满量程的1/1000) | 满量程的1% | 1.2 ms |
| 满量程的10% | 3.5 ms | |
| 满量程的100% | 11 ms | |
| 典型速度(矢量调试) | 处理速度 | 4 rad/s |
| 定位速度 | 50 rad/s | |
| 动态性能 | 跟随误差 | 0.6 ms |
| 重复精度 | < 22 μrad | |
| 8小时长期工作漂移(系统预热后) | < 0.6 mrad | |
| 光学性能 | 典型扫描角度 | ±0.35 rad |
| 增益误差 | < 5 mrad | |
| 非线性 | < 3.5 mrad | |
| 电源需求 | ±(15+1.5)VDC, 每路max. 8A | |
| 输入输出信号 | SL2-100 或者光数据传输(XY2-100-O) | |
| 重量 | 21-37kg | |
| 操作温度 | 25°C ± 10°C | |
| 典型水冷需求 | 3 l/min @20°C 和 p< 0.1bar, p< 4bar |
-
工作在1030nm, 1055-1085nm 和 1070-1850的镀膜镜片都有供应。
-
宽带宽扫描镜片的最大承受激光功率略有降低。
-
供应小数值孔径转接头。
典型光学配置
| 物镜前扫描 | 物镜前扫描 | 物镜后扫描 | |
| 聚焦镜片焦距 | 460mm | 330 mm | 660 mm |
| 操作距离 | 488mm | 382 mm | 472 mm |
| 成像体积(立体) | 220x220x140mm | 185x185x80mm | 370x370x200mm |
| 成像范围(椭圆) | 385x270mm | 240x200mm | 450x450mm |
| Z向焦点范围 | ±70mm | ±40mm | 最大±100mm |
| 焦点光斑大小 | 630μm(150μm光纤) | 600μm(200μm光纤) | 600μm(100μm光纤) |
| 光纤直径 | 100μm,150μm或200μm | 150μm或200μm | 50μm或100μm |
| 成像比例 | 1:4 | 1:3 | 1:6 |
手机/微信:13242449659电话:0755-89355351 QQ:842471885 邮箱:842471885@qq.com